|

|
|

|
Snap to a RoadWilfried Mestdagh's article shows how to take a lat/lon and find the nearest road relative to that point. The technique, written entirely in Delphi, employs reverse geocoding and determines the lat/lon using a CalcXY routine.
This article will show how to snap a position to a road. Many times a GPS receiver's calculated position is not as accurate as we should like it to be, and when you project the position in MapPoint by means of a pushpin the vehicle is not on the road. Also a vehicle might be not on any (digitized) road at all, for example it can be on a field or a parking lot. In that case you don't want to snap it to a road but you maybe want information like: 'The vehicle is 20 meters south-east from streetname, streetnumber'. And this is exacly what the code given in this article will produce. One warning is that if your application assumes a position that is not the real (actually the wrong) position that the GPS receiver gives you, you might get into trouble if customar is not fully informed of this assumption, so please be very clear on this. Getting wrong or mis-leading data is one thing, but letting an application make assumptions can get dangerous because it can be false information.
This code example is written in Delphi, but even if you code in another language it should be fine readable for you. Afterall you're a programmer :). First we create a little class named TMapPoint which handles the program's execution. This constructor creates a hidden MapPoint object because even if we have a visible map in the application we do not want to change it when this class is executing. There is only one public method: function TMapPoint.GetStreetAddr(Lat, Lon: double; Streets: TStrings;It take as arguments Latitude Lat and Longitude Lon and puts the result values in Streets, Direction and Distance.
It first checks if the given coordinates are on a street calling
I'm not going to discuss the
The function TMapPoint.FindAddr(Lat, Lon: double; Streets: TStrings): boolean;What it does is check the StreetResults collection. It can have several or non Location objects, and it can contain other objects too, so we have to take all this into account. Finally it checks if the StreetAddress property is not nil and it adds the street to the output.
The function TMapPoint.CalcInCircle(CenterLat, CenterLon: double;As you see we have two loops in there. The outer loop checks if we are within the maximum radius and the inner loop computes if we have a street on the circumfence of the circle. The mysterious 1 / 60 / 1852 is because we will plot our points in meters. FDistanceResolution is the distance between our search points on the circumfence and also the increment value of the radius of the circle. CalcXY computes for each point the correct Latitude and Longitude, and findAddr (already discussed) checks if we are on a street. The moment we found a street we return from this function.
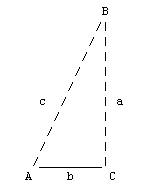
I think the rest is self-expanatory, so we only have to discuss the calcultion given A en c
CalcXY makes use of:
procedure TMapPoint.CalcXY(centerLat, centerLon, Angle, Radius: double; out Lat, lon: double);
As you see it is used as in the above drawing to calculate a
latitude / longitude pair of the points on the circumfence. We need the
I might share an interesting word about the I have dropped the complete code here in this textbox so you can easily copy it if needed. After all, so much of programming is just a copy / paste operation :).
 Author: Wilfried Mestdagh Author: Wilfried MestdaghEmail: wilfried(AT)mestdagh.biz Wilfried Mestdagh works as software engineer at the company Sonal in Mortsel, Belgium. His main work is writing software for fleet management and onboard computers. Fleet management is mainly written in Delphi and C# while the onboard computers are mostly programmed in C. His department started years ago for specializing in tracking and tracing security and dangerous transport vehicles, but it is grown to satisfy a very wide of vehicle / truck fleet customers.
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||